As for the software side of robotics, I worked on SLAM. I was able to get the scan matching algorithm working. This algorithm attempts to use SLAM to converge every possible pair of sonar scans of a cistern in order to localize the ROV for each scan's position.
Before we added the "Auto-converge" localization technique, we were manually mosaicking the sonar scans together and then measuring the displacement values between a reference scan and all the other scans. The displacement values for each scan were inputted into the code and used as the initial locations of the ROV when trying to add scans to a map. The code we have now does this mosaicking automatically.
The next step is to figure out how to prevent the particles from converging in the wrong location. I'm writing a paper on the Malta work from last year up till now, which is consuming most of my time.
Here are before and after images of merging two scans. Here I'm just using SLAM to add the second scan.
 | 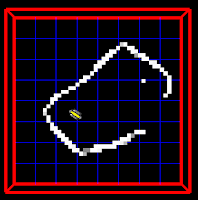 |